
Blog - LEDbar controller for Garbage run 2018
09-Feb-2018

Atmega based LEDbar controller to switch 4 LEDbars (12v 180w) on a car for the Garbage run 2018
Updated on: 05-02-2018 :: Version 0.1
Specifications
Schematic
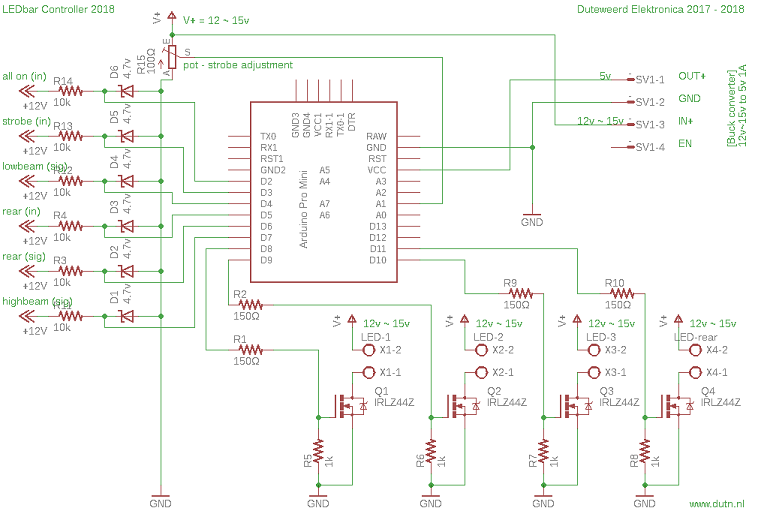
..
Parts
Part details used for the controller:
ATmega source code (Arduino IDE)
/*
Atmega sketch for LEDbar controller - Duteweerd Elektronica 2017 - 2018
*/
int allOnPin = 2; //Switch: All on (Pin2)
int strobePin = 3; //
int LEDBar_10frontPin = 4; //
int LEDBar_rearPin = 5; //
int LEDBar_highbeamSigPin = 7; //
int LEDBar_rearSigPin = 6; //
int LEDbarF1_outPin = 8; //
int LEDbarF2_outPin = 9; //
int LEDbarF3_outPin = 10; //
int LEDbarR1_outPin = 11; //
int HeartBeat_LEDPin = 13; //
int strobe_potPin = A1; //
int val_allOnPin = 0;
int val_strobePin = 0;
int val_LEDBar_10frontPin = 0;
int val_LEDBar_rearPin = 0;
int val_LEDBar_highbeamSigPin = 0;
int val_LEDBar_rearSigPin = 0;
int val_strobe_potPin = 0;
int randNumber;
int last_allOnPin = LOW;
int last_strobePin = LOW;
int last_LEDBar_10frontPin = LOW;
int last_LEDBar_rearPin = LOW;
int last_LEDBar_highbeamSigPin = LOW;
int last_LEDBar_rearSigPin = LOW;
void setup() {
// initialize PINS for INPUT
pinMode(allOnPin, INPUT);
pinMode(strobePin, INPUT);
pinMode(LEDBar_10frontPin, INPUT);
pinMode(LEDBar_rearPin, INPUT);
pinMode(LEDBar_highbeamSigPin, INPUT);
pinMode(LEDBar_rearSigPin, INPUT);
pinMode(strobe_potPin, INPUT);
// initialize PINS for OUTPUT
pinMode(LEDbarF1_outPin, OUTPUT);
pinMode(LEDbarF2_outPin, OUTPUT);
pinMode(LEDbarF3_outPin, OUTPUT);
pinMode(LEDbarR1_outPin, OUTPUT);
pinMode(HeartBeat_LEDPin, OUTPUT);
}
void heartbeat() {
//Perform a heartbeat indication on LED (Buildin Pin 13)
digitalWrite(HeartBeat_LEDPin, HIGH); // turn the LED on (HIGH is the voltage level)
delay(500); // wait for half a second
digitalWrite(HeartBeat_LEDPin, LOW); // turn the LED off by making the voltage LOW
delay(1000); // wait for a second
}
void strobe() {
//Strobe function code
randNumber = random(8, 12); // select random output for strobe
digitalWrite(randNumber, HIGH);
delay(val_strobe_potPin); // wait for however potentiometer value is
digitalWrite(randNumber, LOW);
delay(val_strobe_potPin); // wait for however potentiometer value is
}
void loop() {
// Read switch states
val_allOnPin = digitalRead(allOnPin);
val_strobePin = digitalRead(strobePin);
val_LEDBar_10frontPin = digitalRead(LEDBar_10frontPin);
val_LEDBar_rearPin = digitalRead(LEDBar_rearPin);
val_LEDBar_highbeamSigPin = digitalRead(LEDBar_highbeamSigPin);
val_LEDBar_rearSigPin = digitalRead(LEDBar_rearSigPin);
val_strobe_potPin = map(analogRead (strobe_potPin), 0, 1023, 10, 1000);
//heartbeat(); //heartbeat LED function
if (val_strobePin == HIGH & last_strobePin == LOW) {
digitalWrite(LEDbarR1_outPin, LOW);
digitalWrite(LEDbarF1_outPin, LOW);
digitalWrite(LEDbarF2_outPin, LOW);
digitalWrite(LEDbarF3_outPin, LOW);
last_strobePin = HIGH;
}
if (val_strobePin == LOW & last_strobePin == HIGH) {
last_strobePin = LOW;
}
if (val_strobePin == HIGH) {
//Code to start strobe function
strobe();
return;
}
//Rear light function
if (val_LEDBar_rearSigPin == HIGH) {
//code to start rear light function
digitalWrite(LEDbarR1_outPin, HIGH);
last_LEDBar_rearSigPin = HIGH;
}
if (val_LEDBar_rearSigPin == LOW & last_LEDBar_rearSigPin == HIGH) {
digitalWrite(LEDbarR1_outPin, LOW);
last_LEDBar_rearSigPin = LOW;
}
//Rear light function
if (val_LEDBar_rearPin == HIGH) {
//code to start rear light function
digitalWrite(LEDbarR1_outPin, HIGH);
last_LEDBar_rearPin = HIGH;
}
if (val_LEDBar_rearPin == LOW & last_LEDBar_rearPin == HIGH) {
digitalWrite(LEDbarR1_outPin, LOW);
last_LEDBar_rearPin = LOW;
}
//High beam function
if (val_LEDBar_highbeamSigPin == HIGH) {
//code to start high beam function
digitalWrite(LEDbarF1_outPin, HIGH);
digitalWrite(LEDbarF2_outPin, HIGH);
digitalWrite(LEDbarF3_outPin, HIGH);
last_LEDBar_highbeamSigPin = HIGH;
}
if (val_LEDBar_highbeamSigPin == LOW & last_LEDBar_highbeamSigPin == HIGH) {
digitalWrite(LEDbarF1_outPin, LOW);
digitalWrite(LEDbarF2_outPin, LOW);
digitalWrite(LEDbarF3_outPin, LOW);
last_LEDBar_highbeamSigPin = LOW;
}
if (val_allOnPin == HIGH) {
//Code to start allOn function
digitalWrite(LEDbarR1_outPin, HIGH);
digitalWrite(LEDbarF1_outPin, HIGH);
digitalWrite(LEDbarF2_outPin, HIGH);
digitalWrite(LEDbarF3_outPin, HIGH);
last_allOnPin = HIGH;
}
if (val_allOnPin == LOW & last_allOnPin == HIGH) {
digitalWrite(LEDbarR1_outPin, LOW);
digitalWrite(LEDbarF1_outPin, LOW);
digitalWrite(LEDbarF2_outPin, LOW);
digitalWrite(LEDbarF3_outPin, LOW);
last_allOnPin = LOW;
}
if (val_LEDBar_10frontPin == HIGH) {
//Code to start allOn function
digitalWrite(LEDbarF1_outPin, 30);
last_LEDBar_10frontPin = HIGH;
}
if (val_LEDBar_10frontPin == LOW & last_LEDBar_10frontPin == HIGH) {
digitalWrite(LEDbarF1_outPin, LOW);
last_LEDBar_10frontPin = LOW;
}
}
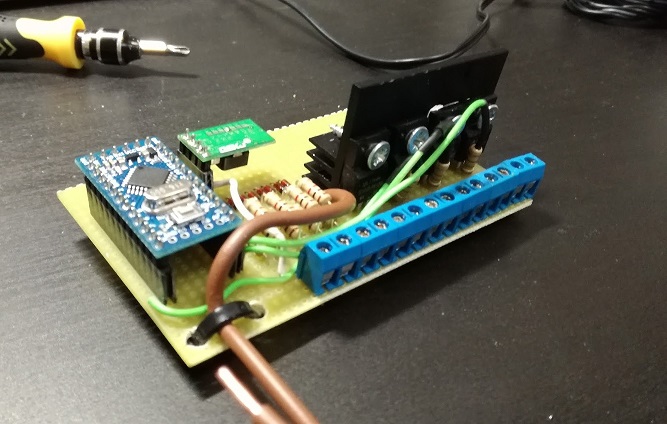
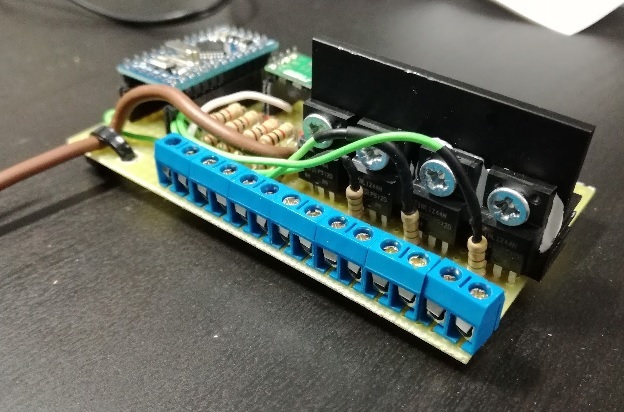
Finished product
If you have any questions about this topic, please contact me
If this was interesting for you, please consider a donation via PayPal here